|
|

|

|
| e-Pub |
Section: New Results
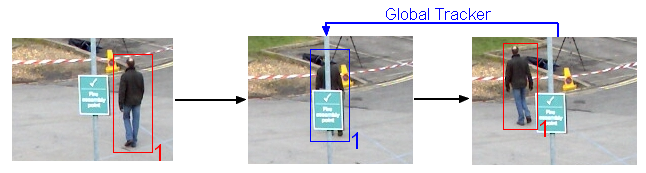
Global Tracker : an Online Evaluation Framework to Improve Tracking Quality
Participants : Julien Badie, Slawomir Bak, Duc Phu Chau, François Brémond, Monique Thonnat.
keywords: online quality estimation, improving tracking results
This work addresses the problem of estimating the quality of a tracking algorithm during runtime and correcting the anomalies found. Evaluating and tuning a tracking algorithm generally requires multiple runs and a ground truth. The proposed online evaluation framework, called global tracker, overcome these limitations by proposing a three-steps algorithm to improve tracking results in any kind of situations (mono-camera, camera network, 3D camera, ...).
The first step aims at correcting small tracking errors (when detections in consecutive frames are missing from an object trajectory) by interpolating the detected object data.
The second steps aims at detecting and correcting any anomaly found in the output of the tracking algorithm. For each detected object on each frame, we compute three different sets of features : the features that are computed using only data from the object (eg. appearance, size, ...), the features that measure the level of interaction between two objects (eg. occlusion level, density) and the features that measure the level of interaction between the object and the environment (eg. occlusion with background element, entering or leaving zones, ...). By studying the evolution of the coefficients of variation of each feature, some anomalies can be detected. Then, by minimizing an energy function based on the object-only features, we correct the output of the tracking algorithm.
The final step uses re-acquisition and re-identification methods to merge detected objects representing the same real object. This algorithm aims at correcting ID change errors when an object leaves the scene and reappears in another camera or when the object reappears after a long-term occlusion. The method used here is a constrained clustering algorithm that create groups of detections representing the same real object.
|
This approach has been tested on several datasets (PETS 2009, Caviar, TUD-Stadtmitte). The results show that the global tracker, even associated with a tracking algorithm that does not have good results, can perform nearly as well as the state of the art and even exactly as well when a good tracker is used. On the Caviar dataset, the global tracker is even able to slightly outperform the result of the state of the art.
| Method | MOTA | MOTP | |
| Berclaz et al. [60] | 0.80 | 0.58 | 0.69 |
| Shitrit et al. [58] | 0.81 | 0.58 | 0.70 |
| Henriques et al. [72] | 0.85 | 0.69 | 0.77 |
| Chau et al. [33] without global tracker | 0.62 | 0.63 | 0.63 |
| Chau et al. [33] with global tracker | 0.85 | 0.71 | 0.78 |
A part of this approach is described in an article published in AVSS 2013 [33] . This article shows how a tracking algorithm can use the global tracker results to tune its parameters and improve its results. This work was also used to improve the tracking results in 2 papers [38] [54] .